
詳情
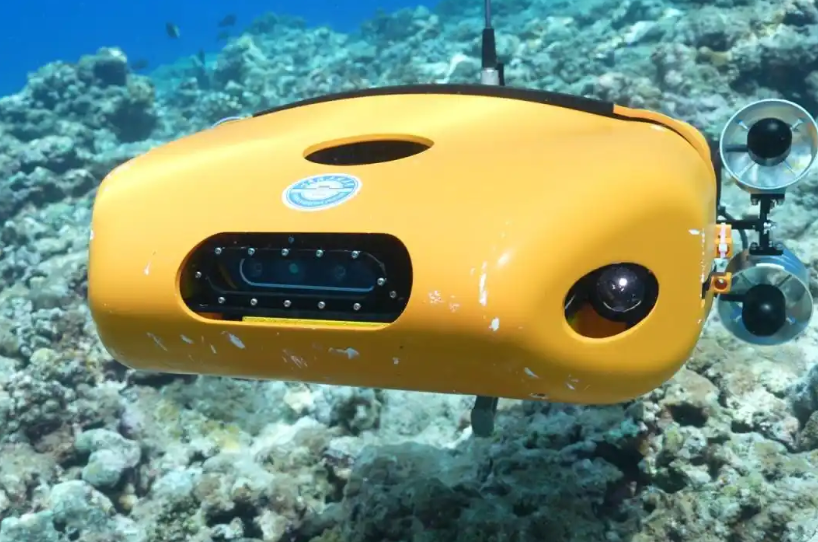
近日,在南海的晨光中,一臺直徑約70厘米的水下機器人以優雅的弧線潛入碧波。它緊貼海底,距珊瑚礁盤僅幾厘米,輕巧游動,四周沉積物只泛起細微漣漪。即便魚群突然掠過,它也能靈巧扭動,從縫隙中穿梭而過,宛如海底飛盤般敏捷。
這是哈爾濱工程大學船舶與工程學院王剛教授團隊研發的敏捷型水下機器人“海龜”的真實工作場景。它不僅實現了近海底環境觀測的厘米級突破,更以靈動身姿顛覆了傳統水下機器人“笨拙”“僵硬”的刻板印象,開啟一個更加精準、高效、環保的水下探測新時代。
“我們的深潛器每次抵達海底,都要先等沉積物散去才能工作,這個過程需要很長時間。”在一次學術會議上,王剛聽到這句抱怨時,職業敏感讓他心頭一震。
王剛團隊將目光投向海洋生物,仔細研究了數十種海底動物后,從海龜的推進方式中找到了靈感。團隊成員劉開鑫回憶:“我們發現海龜傾斜拍動前肢的推進方式,既能減少水體擾動,又能保持高效推進。”
在隨后的半年多時間里,團隊經歷了無數次失敗后,最終推導出了機器人低擾動航行性能與推進器布局以及機器人外形參數之間的數學公式。當電腦屏幕上顯示出性能提升的曲線時,整個實驗室都為之沸騰。
對比試驗中,傳統水下機器人靠近海底時激起半米高的泥沙云,而“海龜”機器人憑借其精準布局的推進器,幾乎在航行時不泛起漣漪,沉積物干擾降低了90%。

海底環境復雜多變,凹凸不平,障礙物眾多。如何使機器人持續貼底并近距離運動,即使在崎嶇地形中也能靈活穿梭?這一難題困擾團隊許久。
團隊成員提出,將機器人的姿態信息融入算法中。這一改變或許能讓機器人像章魚觸手般靈活,實現360度自由調整姿態。
經過半年攻關,團隊成功在跟蹤算法中引入了姿態約束算法,使航行器姿態與環境碰撞關系深度融合,從而大大提高了機器人的敏捷性。
那么,敏捷型機器人到底有多敏捷呢?團隊通過一場“水下雜技”表演為我們揭曉答案。
在實海測試中,科研人員在海底設置了一個寬度1米、高度0.8米的異形框架,讓懸掛繩索的“海龜”機器人在該框架上完成打結任務。這對于寬度0.93米的“海龜”來說,是一項極限挑戰。然而,“海龜”機器人卻從容不迫,迅速完成了一系列動作,整個過程僅用時3分鐘。
看到這一幕,行業專家對這個“國際首臺敏捷型”水下機器人交口稱贊。“海龜”機器人360度的靈活運動,成功突破了水下航行器在海底復雜地形全域機動的技術瓶頸。專家們認為,“海龜”機器人不僅能用于觀測珊瑚,還能在水下捕撈、搜救等方面發揮重要作用。
掃二維碼用手機看
上一個:
無
下一個:
以海水淡化利用助力海洋經濟高質量發展
上一個:
無
下一個:
以海水淡化利用助力海洋經濟高質量發展









Copyright? 2021 - 2025 | 海洋歡樂谷 中國海洋大學出版社有限公司 | 魯ICP備07502856號 | 中企動力 青島 | 海洋歡樂谷.中國 | 海洋歡樂谷.cn | 海洋歡樂谷.net | 海洋歡樂谷. com